医デジ化を推進するにあたってわれわれが独自に開発・蓄積してきた医療ロボットの機構に関するコア基盤技術とその医療機器への展開について概説する。
まず1点めとして,われわれは高速・高精度かつ安全・安心なロボット動作を実現するための小型・軽量・高剛性機構設計技術を有する。これは耐水性に優れた軽量かつ高強度なアクリル素材を用いた直動あるいは曲率ガイドなど,力を受けても変形しづらいガイド機構を用いて実現する。
2点めとして,水中でロボット機構を動作させるための防水機構に特徴がある。人体との音響インピーダンスの整合性を高めるためにわれわれのシステムは超音波プローブやトランスデューサを先端に配置したロボット機構を水中で動作させる。プローブと患部との距離や押しつけ力を調整することで診断画像の適正化を図る。上記調整による診断画像の適正化は,追従のための画像の質(IQ: Image Quality)の向上にも資する。
3点めとして,患者にとって安全・安心で医師にとっての扱いやすい機構設計技術である。これは直観的に動作機構が理解しやすく,スケルトンボディで可視化されたアフォーダンスの高い機構によって具現化する。アフォーダンスとは医療機器のデザインや動作が周囲に発するメッセージのことで,その装置をどのように扱ったらよいか?その装置が安全・安心であるか?についてのメッセージを医師や患者に暗黙的に与える(affordする)。アフォーダンスを高めることで医療機器のマニュアルをできる限り薄いものとするべきである。
(直観化はなぜ必要か?)~~~~~~~
『直観化はなぜ必要か?』と問われたとき,『アフォーダンスを高めることでヒトができるだけマニュアルなしで扱えるようにするため』ということが一定の説得力のある回答のひとつであろう(ヒトのなかでもとりわけ医療従事者はとても忙しいのである,,,)。アフォーダンスの高い機構は思考経済的にみてもヒトにとって極めてやさしい。
アフォーダンスを高めることはなにも機構に限った話ではない。人間とのインタフェース部分全般にわたって,アフォーダンスを高めて医用機器をより扱いやすいものにすることが,装置および診断・治療法を一般に広く普及するうえでシステム側に強く求められており,今後ますますその傾向は強まるであろう。
IT技術のなかでもとりわけロボット技術はアフォーダンスを高めるうえできわめて有効であり,その中核的な技術になりうる(根拠のひとつとして,ロボットはその形態や機能が人間の鏡像[1]として直観的に捉えやすいことが挙げられる)。
具体的にIoT(Internet of Things)や機械学習といった技術は医療機器の分野においても今後ますます深く入り込んでくるだろう,,,このためには擬人化のシンボルとしてのロボット化がきわめて有効であり,超音波診断/治療装置においても今後ますますそのロボット化が進むであろう。
~~~~~~~(直観化はなぜ必要か?)
ヒトは泥臭くシンプルかつプリミティブなものから発想を得ることが多い。一方で,これをなるべくエレガントな形にラッピング(整形)してから伝えたがる傾向にある。しかしながら,エレガントにラッピング(整形)される過程で,当初の目的や概念が埋没,覆い隠され,発想の原点がダイレクトに伝わりにくくなる傾向がある[2]。つまり、エレガントに整形することによってアフォーダンスは低下してしまう危険性があるのだ。
この事実を踏まえてアフォーダンスを高めるためにまず行なうべきことは,『目的(どうして,何のために(why?)このようなものを作ろうと思ったのか),つくったものがどのようなものか(概念)が泥臭くてもよいからダイレクト(一目瞭然)に伝わるように発想の原点に立ち戻ったプリミティブでシンプルな形や動作を追求する』ことである。
『仕様(how? 実現した機能の詳細やその性能等)を伝える』のはその後段で行なうべきである。ヒトはまず仕様(how? 実現した機能の詳細やその性能等)を説明したがる傾向にあるが,効果的な説明を考えると順序は逆なのだ!
~~~~~~~(エレガントに整形されたものから発想の原点に立ち戻ることは案外むずかしい)
(参考文献)
[1] 内山 勝, 中村仁彦, ロボットモーション, 岩波書店, 2004.
[2] 長沼伸一郎, 物理数学の直観的方法, 2011.
 |
| ロボット機構に関する医デジ化コア基盤技術 |
慣性座標系と剛体の位置・姿勢
慣性座標系とは、空間に静止しているか、等速直線運動をしている座標系である。
剛体の姿勢とは、世界座標からみて剛体座標系がどのように傾いているかを表す。
剛体の位置とは、世界座標からみた剛体座標系の原点の位置である。
剛体の姿勢表現としては、以下の3つに大別される。
1. 直交行列(回転行列あるいは姿勢変換行列とよばれる)
剛体の姿勢表現としては、以下の3つに大別される。
1. 直交行列(回転行列あるいは姿勢変換行列とよばれる)
2. オイラー角
3. 四元数(オイラーパラメータあるいはクォータニオンとよばれる)
直交行列による表現(回転行列あるいは姿勢変換行列)は直観的に理解しやすく数学的にもとっても扱いやすい。同次変換行列は、この姿勢変換行列の考え方を拡張して、姿勢のみならず、位置の表現もふくめてひとつの行列で同時(同次ではない!)に表現しようとするもので、とっても便利でおトクな表現である。欠点としては、6個の余分な変数を含むことである。
同じものである直交行列を姿勢変換行列と呼んだり、回転行列と呼んだりするのは、モノの観方(観点)の違いに起因するものである。直交行列を回転行列と呼ぶときの観点は、(世界座標系で表現されている)剛体に固定されたベクトルを、(世界座標で表現された回転行列によってあらわされる)回転によって剛体もろとも変化させようとする観点である。
直交行列を姿勢変換行列と呼ぶときの観点は、剛体座標系で表現されている姿勢をあらわすベクトルの成分を別の座標系(たとえば世界座標系)で表現された姿勢をあらわすベクトルの成分に(姿勢変換行列によって)変換しようとする観点である。回転行列と姿勢変換行列は、たとえ元が同じものであってもモノの観方によって、随分異なったもののように感じられる一つの典型例といえよう。
オイラー角には最小の変数の個数(3個)で剛体の姿勢を表現できるという大きな利点があり、よく採用される。一方で、オイラー角という姿勢表現に随伴(ずいはん)する固有の特異点の存在には注意を要する。これは、物理的に生じる機構的特異点とは異なる類(たぐい)の特異点である。
順方向の計算は常に可能である。逆方向の計算が困難になる点を特異点という。困難になるとは、計算ができなくなるような点、あるいは解が一意に得られない(変換(演算)前後で一対一の対応が得られない)ような点である。
オイラー角の回転の順番は、2度同じ回転軸が連続しなければどのように選択してもよい。一般に、Z-Y-Zオイラー角やZ-Y-Xオイラー角が多用されている。
Z-Y-Zオイラー角ではsin(β)=0の場合に(原点が特異点に含まれる。これは場合によっては致命的な欠点になるだろう)、Z-Y-Xオイラー角ではcos(β)=0の場合に特異点をもつ。いずれの場合も1回目と3回目の回転軸が平行になり、線形独立でなくなることが特異点発生のメカニズムである。
オイラー角を用いたロボットの制御においてはオイラー角から姿勢変換行列を求めたり、この逆方向の演算が頻回におこなわれる。逆方向の演算においては多くのプログラミング言語に組み込まれている逆正接関数atan2(y,x)などの逆三角関数の演算を用いる。
オイラーパラメータには逆方向の演算(姿勢変換行列からオイラーパラメータを求める演算)ができなくなるような特異点は存在しないのが利点である。特異点が存在しないという事実は解がかならず見つかることにつながり、システムを実装するうえで大きな安心感につながる。
3. 四元数(オイラーパラメータあるいはクォータニオンとよばれる)
直交行列による表現(回転行列あるいは姿勢変換行列)は直観的に理解しやすく数学的にもとっても扱いやすい。同次変換行列は、この姿勢変換行列の考え方を拡張して、姿勢のみならず、位置の表現もふくめてひとつの行列で同時(同次ではない!)に表現しようとするもので、とっても便利でおトクな表現である。欠点としては、6個の余分な変数を含むことである。
同じものである直交行列を姿勢変換行列と呼んだり、回転行列と呼んだりするのは、モノの観方(観点)の違いに起因するものである。直交行列を回転行列と呼ぶときの観点は、(世界座標系で表現されている)剛体に固定されたベクトルを、(世界座標で表現された回転行列によってあらわされる)回転によって剛体もろとも変化させようとする観点である。
直交行列を姿勢変換行列と呼ぶときの観点は、剛体座標系で表現されている姿勢をあらわすベクトルの成分を別の座標系(たとえば世界座標系)で表現された姿勢をあらわすベクトルの成分に(姿勢変換行列によって)変換しようとする観点である。回転行列と姿勢変換行列は、たとえ元が同じものであってもモノの観方によって、随分異なったもののように感じられる一つの典型例といえよう。
オイラー角には最小の変数の個数(3個)で剛体の姿勢を表現できるという大きな利点があり、よく採用される。一方で、オイラー角という姿勢表現に随伴(ずいはん)する固有の特異点の存在には注意を要する。これは、物理的に生じる機構的特異点とは異なる類(たぐい)の特異点である。
順方向の計算は常に可能である。逆方向の計算が困難になる点を特異点という。困難になるとは、計算ができなくなるような点、あるいは解が一意に得られない(変換(演算)前後で一対一の対応が得られない)ような点である。
オイラー角の回転の順番は、2度同じ回転軸が連続しなければどのように選択してもよい。一般に、Z-Y-Zオイラー角やZ-Y-Xオイラー角が多用されている。
Z-Y-Zオイラー角ではsin(β)=0の場合に(原点が特異点に含まれる。これは場合によっては致命的な欠点になるだろう)、Z-Y-Xオイラー角ではcos(β)=0の場合に特異点をもつ。いずれの場合も1回目と3回目の回転軸が平行になり、線形独立でなくなることが特異点発生のメカニズムである。
オイラー角を用いたロボットの制御においてはオイラー角から姿勢変換行列を求めたり、この逆方向の演算が頻回におこなわれる。逆方向の演算においては多くのプログラミング言語に組み込まれている逆正接関数atan2(y,x)などの逆三角関数の演算を用いる。
オイラーパラメータには逆方向の演算(姿勢変換行列からオイラーパラメータを求める演算)ができなくなるような特異点は存在しないのが利点である。特異点が存在しないという事実は解がかならず見つかることにつながり、システムを実装するうえで大きな安心感につながる。
クオータニオンの式はかの有名なオイラーの恒等式(2次元の姿勢変換を表せる)の4元数拡張(3次元の姿勢変換を表せる)になっている。ここで、nは回転軸方向の単位ベクトル、ψは回転角を表す。いかなる複雑な剛体の姿勢変換も一つの回転軸ベクトルとそのまわりの1回の回転で表現できるということは実に驚くべき重要な事実であるが、クオータニオンの式はこの事実を直観的かつ明解に体現している。

(剛体座標系の原点の並進速度)=(剛体座標系が回転運動することによって生じる剛体座標系の原点の並進速度成分)+(左の項によってインクリメントされる以前の原点の並進速度成分)
(注意)いずれのベクトルも世界座標からみたベクトル
(参考文献)
[1] 内山 勝, 中村仁彦, ロボットモーション, 岩波書店, 2004.
(注意)いずれのベクトルも世界座標からみたベクトル
(参考文献)
[1] 内山 勝, 中村仁彦, ロボットモーション, 岩波書店, 2004.
[2] https://www.sports-sensing.com/brands/labss/motionmeasurement/motion_biomechanics/quaternion03.html
複素共役(ふくそきょうやく)をとるオペレーションが右手系と左手系の入れ替わりに対応していて鏡像(きょうぞう)関係にある
不思議の国のアリスよろしく鏡の中の世界(Mirror world:ミロ・ワールド)では、鏡の中の自分と実世界の自分とは対向(たいこう)しており、右手は左手に、左手は右手に入れ替わっていることに気づくだろう。
座標系を定める際には、右手系と左手系をしっかり、くっきり、はっきりと明確に区別しておく必要がある(医療においても、右と左を取り違えることは臓器の取り違えミスなど、大惨事に結びつく可能性があるため、特段の注意が必要である)。
他方で、頭尾(首尾、体軸)方向は変わらない。スマホなど、CCDカメラの映像においては、右ピッチャーはしっかり右手で投げており、このような右手系と左手系の入れ替わり現象を一般の映像では起こさないように(配慮)しているのが通常である。
しかしながら、デジタルデータ上では簡単に左右反転の処理ができてしまう(深層学習においては、このことを利用して学習用のデータを増やすことが多い※)ため、今、自身が見ている映像が右手系なのか左手系なのかを混同しないように、(特に医療においては)常に留意(りゅうい)しておく必要がある。
※データ・オーグメンテーションと呼ばれる。
右手系と左手系の鏡像関係に対応する数学的表現の一般・代表・典型例のひとつは複素共役(ふくそきょうやく)をとるオペレーション(*:アスター)である。右手の方向に虚軸をとると(したがって、虚軸と直交する体軸方向が実軸)、鏡の中の世界では、頭尾(首尾、体軸)方向がひっくり返ることはないが、右手と左手の方向が入れ替わる。
これに応じて、実軸の符号をそのままに虚部の正負の符号のみが入れ替わる。これがまさに複素共役をとるオペレーション(*:アスター)に対応している。もう一度、複素共役をとると、鏡の中の世界から首尾(しゅび)よく脱出することができて右手はもとの右手に、左手はもとの左手に戻ることができる。頭尾方向は常にそのままである。
すなわち複素計量線形(ユニタリ)空間では(2つの)軸を(互いに)入れ替えるたびに、(入れ替わった軸において)実部の符号をそのままに右手系と左手系の入れ替わりによる(実軸をまたいだ)虚部の符号の入れ替わり現象が起こることになる。
入れ替わった軸において実部の符号が変わらないことは実計量線形(ユークリッド)空間の場合とも整合(せいごう)性がとれて(つじつまが合って)おり※、複素計量線形(ユニタリ)空間が実計量線形(ユークリッド)空間の自然なメタ的拡張になっていることがわかる。換言(かんげん)すれば、実部の符号が変わらない以上、鏡像をつくるためには虚部の符号のほうを入れ替えるしかない。
※企業が事業を開発する場合も、一度、清算して、まっさらな状態からあらたに事業を立ち上げる場合と、過去の事業を継承しながらこれを拡張・発展させてゆく場合がある。後者の場合には過去の事業との整合性の確保が課題になり、旧製品の互換性を考慮した新製品の開発など、過去の事業に対する拘束(こうそく)条件が生じる。
複素計量線形(ユニタリ)空間における各軸は、軸とは言っても普遍・一般・抽象化されたメタ的な概念としての『軸』であり、その実体は複素平面にほかならない。複素平面が面である以上、(互いに鏡像関係にある)表と裏の2パターンの表現が存在し、これが同じく(互いに鏡像関係にある)右手系と左手系の2パターンに対応している。
このため、(2つの)軸を(互いに)入れ替えるたびに、鏡の中の世界と実世界の間を行ったり来たりすることになり、実部の符号をそのままに(各軸の実体たる複素平面の、互いに鏡像関係にある)表と裏(右手系と左手系)の入れ替わりによる(実軸をまたいだ)虚部の符号の入れ替わり現象が起こることになる。
複素計量線形(ユニタリ)空間における鏡映変換をあらわすエルミート行列(対称行列の複素行列版)において、対角線を挟(はさ)んで対向する行列要素が複素共役の関係にあるのは、まさにこの表と裏(右手系と左手系)の入れ替わりによる(実軸をまたいだ)虚部の符号の入れ替わり現象を率直に表現している(率直な数学的表現が物理の本質を垣間見せる好例と言えよう)。
(コラム)われわれの研究室では医療ロボットを、zoom(オンライン会議システム)越しに自身の指を用いた汎用操作インタフェースで遠隔から操作するシステムを開発している。特別な操作入力用のハードウェアを必要とすることなく、だれもが簡便かつ直観的に操作できることが特長である。ここで画面に表示される像はあえて鏡像にしている点に着目されたい。これは、鏡に対面して指を動かす際に鏡像の指先が実像に追従して一緒に動作するのと同様の直観的な操作感覚を実現・提供したいがためである。
このとき汎用操作インタフェースに表示された鏡像と実像の指先の移動方向が(共通の世界座標系からみて!)一致しているため直観的に操作しやすい。他方、カメラの映像をダイレクトに表示してしまうと、指先の移動方向が(共通の世界座標系からみて!)一致しない(反対方向に移動してしまう)ため、直観的に操作しづらい。直観的に見通しのよい座標系の設定はかくも重要である!
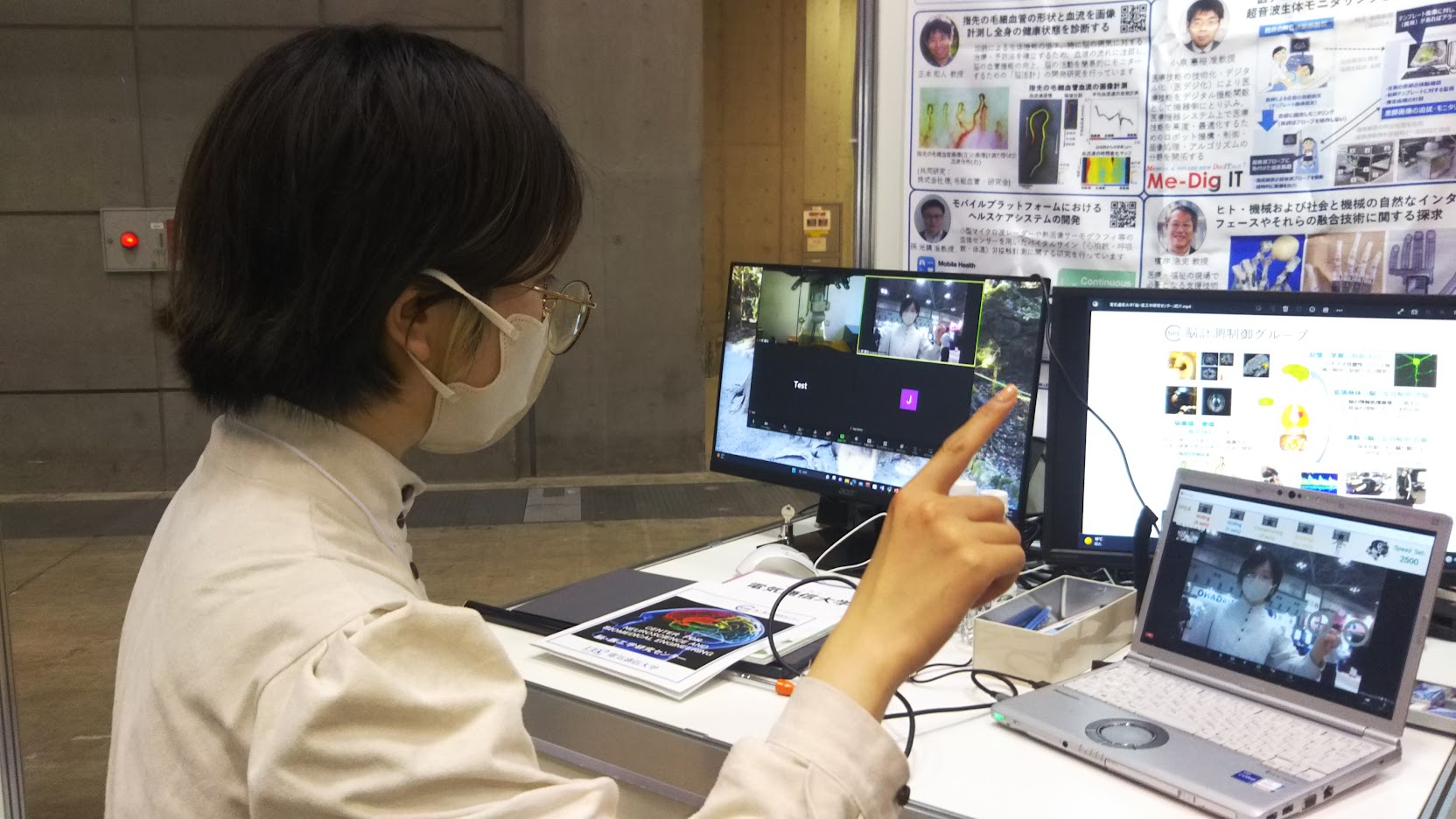 |
 ロボットの遠隔操作の様子(Medtech2023において)。東京ビッグサイトにある自身の指を用いた操作インタフェースから調布の医療ロボットを遠隔操作している。 |
座標変換行列と位置・姿勢変換行列
座標変換行列は、ロボット先端の座標系を根元の世界座標系に変換する行列である。具体的に座標変換行列が左から掛かる右側のベクトルは、ロボット先端の座標系で表現された位置(あるいは単なる)ベクトル表現であり、演算によってロボット根元の世界座標で見たときのその位置(あるいは単なる)ベクトル表現が得られる。
位置・姿勢変換行列は宇宙船や飛行機の座標系(もちろんロボットの先端座標系であってもよい)をイメージすればよい。当初、根元の世界座標系と宇宙船の座標系とが一致していたと考えて、宇宙船の座標系が位置・姿勢を変化させるのに応じて、宇宙船の座標系に埋め込まれた位置(あるいは単なる)ベクトルが宇宙船の座標系と一緒に移動することを表現したものである。
このとき、位置・姿勢変換行列が左から掛かる右側のベクトルは当初、宇宙船の座標系が一致していた世界座標系における位置(あるいは単なる)ベクトル表現であり、演算によってそのベクトルが位置・姿勢を移動したことを表現している。
(参考文献)
[1] 内山 勝, 中村仁彦, ロボットモーション, 岩波書店, 2004.
スクリュー学派
位置および姿勢の表し方。ねじとのanAlogy。
(力の)モーメントとは、対象とする物体に作用する力によって生じ、ある回転軸(点)まわりに対象物体を回転(変位・変形)させようとする能力と一般に説明されるが、『なんだか、(直接的でなくって)意味がとりづらい言葉だなぁ』と思った経験はないだろうか。かくいう私もそのひとりである。
昭和時代のコマーシャルに、『ちいさなものから、おおきなものまで動かす(能)力(チカラ)だ!ヤンマーディーゼル~♪』という印象的なコマーシャルがあった。この『動かす(能)力(チカラ)』こそが(力の)モーメントの正体(しょうたい)であり、動力学という学問の起点である。
つまり、対象物体を動かす(変位・変形・回転させる)能力という観点から力の作用を捉(とら)え直そうとするのが、モーメントの考え方(概念)であり、ひとことでいえば『てこの作用([rx])』のことである。
ここで、運動量(translational momentum)を微分すると力の単位[N]になり、角運動量(angular momentum)を微分すると力のモーメント(トルク)の単位[N・m]となることに着目されたい。
すなわち、力は運動量に変化をもたらし、力のモーメント(トルク)は角運動量に変化をもたらすことで、対象物体を変位・回転させるのである。また、運動量のモーメントは角運動量になる。
モーメントには他にも棒や板を曲げて変形させるとき,棒や板に加えるべき力について、その作用を棒や板を曲げて変形させる能力という観点から捉え直した『曲げモーメント』という概念がある。
『モーメント(moment)』という言葉の語源 は「今、この瞬間ちょっと動いたぞ!」という、ある種の感動をともなったラテン語に由来するそうだ。
これを踏まえて古代の人々がピラミッドをつくりあげるにあたって、重い石や木材をてこの原理で一生懸命動かそうと(てこ入れ)している情景に想いを馳(は)せてみよう。
それまでうんともすんとも動かなかった石や木材が何とかすこしだけ動いたのを見て、『今、この瞬間おいっ、ちょっと動いたぞ!(moment)!』と歓声をあげている、そんなある種の感動をともなった情景がこの『moment !』 というラテン語から想起できはしないだろうか。
われわれがクフ王の大ピラミッドをみるとき、その大きさによってのみ感動するわけではない!現在の最先端の建設機械を使えば、ピラミッドはもっと容易に、さらに大きなものを作ることもできよう。
われわれがピラミッドを見るときに大きく心を動かされる最大の理由は、4500年前に積み上げられたあの石の一つ一つに『今、この瞬間ちょっと動いたぞ!(moment)!』という偉大な感動体験がぎっしり詰まっていることに対して、はるか時空を超えて想いを馳(は)せることができるからであろう。大いなるロマンがそこにはある!のである!
結婚相手にプロポーズするときも同様であろう。自分の心の奥底から衝動的に発せられる何らかのモーメントが相手の心の琴線(きんせん)に触れ(働きかけ)、愛する人の心を動かした瞬間、この瞬間を永遠に!ダイヤモンドは永遠の輝き、DeBeers!となるのである!
研究においても同様である!『今、この瞬間おいっ、ちょっと研究が進んだぞ!(moment)!』という、この偉大なときめきをともなった感動体験のひとつひとつが論文、ピラミッドでいうところの石の一つ一つとなって研究にさらなる推進力をもたらすのである!
多様体とその接ベクトル空間
人体(および体内臓器)はいたるところなめらか(何度でも微分可能)な多様体(Lie群)としてモデル化可能である(熟練した医療専門家が頭のなかでイメージするが如(ごと)く、あくまでイデア論で言うところの最上位のモデルとして『なめらか』であるということである!)。
このとき、多様体上の各点において接ベクトル空間が定義できる。多様体とその接ベクトル空間のコンビネーションにはいくつかの表現パターンのバリエーションが存在するが、直交群(回転群によって球面の一部を構成して、それをパッチワークよろしく継ぎはぎしてゆくイメージである!)と交代行列(瞬間回転をあらわし、その回転軸はデカルトの直交座標系を構成する)のコンビネーションが本質的に重要である。
向きづけられた多様体ではその接ベクトル空間の基底をあらかじめ、正規直交基底にとっておくことによって貼り合わせの関数A(p)がSO(n)(特殊直交群、すなわち回転群)に値をもつ関数であるようにとることができる。
具体的に接ベクトル空間およびそれを計量線形ベクトル空間たらしめる内積の演算はキリング形式として抽出可能である(キリング形式は『トレース・アド・アド』と覚える。ドラゴンクエストIIよろしく、はやぶさの剣と破壊の剣の性質を併せ持つはかぶさの剣で辻斬りするイメージである)。いったん内積の演算が定義されれば、それを足掛かりに長さや角度の計量(メトリックス)、微分・積分などの演算も自由自在に行える。

体内の骨や臓器など、物体を変形させるのは内力(ないりょく)である。内力とは、対象物体をひとつの系として観たときに系の内部のある断面で接しながら押しくらまんじゅうしている部分と部分とが作用・反作用で釣り合っている力およびモーメントのことである。
(棒や板といった、はり状の)部材(物体)の変形を見通しよく簡便に扱うためにはまず内力としての曲げモーメントを同定する必要がある。そこで部材(物体)をはりの軸に垂直な切断面(横断面と呼ぶ)により2つのパーツ(仮にパーツAおよびパーツBとする)に仮想的に切断した状態を考える。
ここで、このような仮想的な切断状態を考えるのは横断面に働く内力の状態を知りたいがためであって、仮想切断面(A側の仮想切断面およびB側の仮想切断面)においては作用・反作用の法則がそのまま成立しつづけている状態を考えることにする。
これにより横断面に作用する曲げモーメントとせん断力をはりの軸に沿って連続的に同定す(一意に定め)ることができる。曲げモーメントが同定されれば、これを用いてたわみ方程式と部材(物体)の両端の境界条件から部材(物体)の変形(状態)を同定することができる。
部材の「曲がりにくさ」は材料の弾性(ゴムよりも木の方が曲がりにくく、木よりも鉄の方が曲がりにくい)や断面の形状・大きさ(荷重などが印加される(曲げる)方向に分厚く(骨太で)、全体として大きい(子供よりも大人の骨の)ほうが曲がりにくい)に依存するため、たわみ方程式にはこれらの特性を部材の「曲がりにくさ」という観点から捉え直した定数(ヤング率および断面2次モーメント)が包含(ほうがん)されることになる。
(参考文献)
[1] http://ads.w3.kanazawa-u.ac.jp/hojo/zairiki/text/02Beam/BMD.htm
[2] http://ads.w3.kanazawa-u.ac.jp/hojo/zairiki/text/02Beam/deflection.htm
[3] http://kentiku-kouzou.jp/danmen2zi.html
剛性率
剛性率は通常Gで表され、せん断応力とせん断ひずみの比で定義される。せん断力に対する変形のしやすさを見通しよく簡便に評価することができる。
(参考文献)
[1] https://ja.wikipedia.org/wiki/%E5%89%9B%E6%80%A7%E7%8E%87
衝突現象
衝突現象で瞬間の力を計測することはきわめて困難であり、運動方程式をそのまま適用することは一般に困難である。
上記を踏まえて見通しよく簡便に衝突現象の力学系を扱うための工夫として、衝突現象については力を積分したもの、すなわち力積(りきせき)で捉えようとするのがまずは一般的なやり方である。
具体的に運動方程式の両辺を積分することで、左辺には運動量、右辺には力積が顕(あらわ)れる。上式における衝突前後の運動量の変化から、質点に印加された力積を見積もるのである。
角速度ベクトル
角速度ベクトルを回転軸上で移動させても、全く同じ回転を表現できる(都合のよいように自由に移動させることができる)。他方、回転軸上から外れて移動させる場合には注意を要する。なぜなら異なる回転を表現してしまうことになるからである。
多様体、なかでも可微分多様体
多様体(manifold)とは、局所的にはユークリッド空間と見なせるような図形や空間のことである。多様体上には好きなところに局所的に座標を描き込むことができる。
可微分多様体(differentiable manifold)は、局所的に十分線型空間に似ており微積分ができるような多様体であり、われわれの扱う多くのモノや領域は可微分多様体として扱うことができる。任意の多様体は、チャート(座標近傍、局所座標)の集まり、アトラス(座標近傍系、局所座標系)、によって記述することができる。
がんや結石といった患部を治療するにあたって、その局在(きょくざい)を精確に同定(医学用語では局在診断と呼ばれる)することができれば、精密な部分治療につながり、機能の温存と治療の両立を図(はか)ることが可能になる。
具体的に、局在を正確に診断(同定)できれば、患部の重心まわり、長軸・短軸方向に直交座標系を配したチャート(座標近傍、局所座標)を設定することができるので、患部の精確な位置・姿勢および拡(ひろ)がりの同定が可能になり、正常な組織を傷つけずに患部のみを治療できることにつながる。医療専門家は患部を球体(あるいは楕円体:ラグビーボールのイメージ)として直観・幾何学・野性的に見通しよく単純・明解に捉えていることが多い。
微分運動学
微分運動学とは微分をとることによって本来非線形性の強い可微分多様体上の運動学の問題をその接平面で捉え直すことにより、直観的に扱いやすく、写像をあらわす行列Aが正則であれば簡単に解くことができる線形(Y=AX)な問題へと帰着させようとするものである。
写像をあらわす行列Aが正則でない場合であっても、線形な問題でさえありさえすれば一般化逆行列(あるいは擬似逆行列)を用いることにより最小二乗解という至適な解の存在を探ることもできる。
逆関数の存在条件(陰関数定理)
逆関数の存在条件は陰関数定理として知られる。陰関数定理によれば、逆関数の存在条件は関数fのヤコビ行列が正則(逆行列が存在する)であることである。ヤコビ行列が非正則になる点を特異点とよぶ。オイラー角を採用する場合には、機構上の特異点と表現上の特異点とが混在する。
外積の演算
外積の演算は歪対称行列とともに視覚的に覚え、直観的に理解してしまうのが思考経済的に優れている。値はベクトルである。ベクトルの方向は回転軸の方向、ベクトルの大きさは回転角の大きさをあらわす。
一般化運動量と角運動量
一般化運動量と角運動量は異なることに着目されたい。角運動量は座標系のとり方に依存しない物理量であるが、一般化運動量は座標系のとり方(たとえばZ-Y-Zオイラー角とするか?、あるいはZ-Y-Xオイラー角とするか?)に依存する物理量である。
ラグランジュの運動方程式
力のモーメントの節でも述べたが、動力学を貫く本質的な観点(世界観)はヤンマーディーゼルのコマーシャルのごとく、『モノを動かす(能)力(チカラ)』という観点である。ラグランジアン(L)は別名、『運動ポテンシャルエネルギー』ともよばれ、運動エネルギー(T)およびポテンシャルエネルギー(U)の差(T-U)を『運動を作り出す能力(モーメント)』という観点から捉え直したものである。
ラグランジアンを時間微分してv(速度)でくくれば、くくったものの中には、慣性力と『ポテンシャルエネルギーUによってつくられる力』が顕(あら)われ、これらが平衡している。これは、ダランベールの原理における動的平衡をあらわす方程式であり、ニュートンの運動方程式そのものである。
ポテンシャルエネルギーが作り出す力以外を外部から受けない力学系において、神(自然)は『作用(仕事)』を最小にするように運動軌道関数を決定するという、『最小作用の原理』の考え方をモーペルチューイは1746年に提唱した。これは、『光は通過に要とする時間が最小となるように進む』という、『光学におけるかの有名なフェルマーの定理の、言わば動力学版』である。
この『最小作用の原理』の最終形態が、『ハミルトンの原理』である。『ハミルトンの原理』を『オイラーの変分問題』として解くと、『ラグランジュの運動方程式』が得られる。ポテンシャルエネルギーで表現できない種類の一般化力Q(たとえばロボットの関節に印加されるモータの駆動力等)が作用するときには、得られたラグランジュの運動方程式の右辺に一般化力Qを付加することで対応する。
具体的に、ラグランジアンL=T-Uとよばれる、運動エネルギーTとポテンシャルエネルギーUによって構成される、スカラー値関数Lの時間積分(Lは関数の関数であるということから、汎関数とよばれるものの一つである)に停留値を与えるものがラグランジュの運動方程式であり、『作用(運動ポテンシャルであるラグランジアンが作り出す力によってなされる仕事)』を最小にする運動軌道関数を与えるものである。
言い換えれば、運動ポテンシャルの高い軌道を描くためには、その分余計な仕事が発生してしまい、コストが高くついてしまうのである。神(自然)は節約志向でそのような余計なコストを嫌い、これを極力避けように軌道を決定するのだ(とても人間的ではないか!)。
なぜなら一般化座標が決定されるとこれに応じて、力(一般化力)や運動量(一般化運動量)の表現形式までもが決定されてしまうからである。表記、表現上の工夫自体がイノベーションにつながることもある!ここは思考錯誤のしどころであろう。
ある運動軌道軌道関数がラグランジアンLに停留値を与えるとは、運動ポテンシャルであるラグランジアンLが作り出す候補となる運動軌道関数の集合のなかで、その関数がスカラー値関数であるラグランジアンLに極大点か極小点か、あるいは鞍点(あんてん)を与えるということである。
物体はポテンシャルエネルギーが低いほうにゆきたがる。具体的に、静力学の場合のポテンシャルエネルギーが極小のところではどちらに動いてもポテンシャルエネルギーが上がってしまうので、その場に停留する。他方、極大のところでは、どちらに動いてもポテンシャルエネルギーが下がる。
このためどちらにも行きたいが、どちらに動いてよいのか決められずにその場にさまよい、停留している。しかしながらこのような状況はきわめて不安定な状態であるため、ちょっとでもつつかれようものなら、関が原の戦いの小早川秀秋のごとく、つつかれた方向に移動して再び元の場所に戻ってこない。
運動ポテンシャルであるラグランジアンにおいても同様である。運動ポテンシャルエネルギーとしてのラグランジアンがなるべく低くなるように神(自然)は運動軌道を決定するのである!最小作用の原理は物理学における最大の指導原理の一つと言われる。確率的ではあるが人の行動原理もまた、総じて観れば同様かもしれない、、、
ダランベールの原理
ダランベールは運動の問題を平衡の問題、すなわち動的平衡の問題として扱うことができることを発見した。これをダランベールの原理という。ダランベールの原理をもちいるとロボットの運動の問題を、コリオリ力と遠心力を含めた慣性力、重力によってリンク系に加わる力を関節に加わる力として等価的に表現したもの、関節入力トルク、外力の間のつりあいの問題、言わば『動的平衡の問題』として扱うことができる。
ちょっと複雑なロボットの運動を考えるに際して、今扱っているベクトルや座標系がどの座標系に眼を置いて観たものか、頭の中でこんがらがってしまった経験はないだろうか?かくいう私もその一人である。
このような状況を避けるためには、面倒くさがらずにベクトルや行列の右肩あるいは左肩に添え字を配して、成分表示を行なっている座標系を明示することが重要である。
直観的に見通しよく、なるべく簡便に扱えるよう、表記法の工夫を凝らすことは、アフォーダンスの観点から人間にとって極めて重要である。ロボットの座標系設定においてもこれは同様であり、人間にとって直観的に扱いやすいように座標系を定めた、DH記法がよく用いられる。
DH記法ではロボットの運動を直観的に見通しよく表現するために、リンク(i)の先端の関節部にそのリンク(i)の座標系{i}がおかれる。このとき、リンク座標系のz軸は関節軸の方向と一致させる。
また、各リンクの運動方程式を導出するにあたっては、質量中心(重心)を原点とする座標系{i_c}を置いて、座標系{i_c}の速度(角速度),加速度(角加速度)を計算することが必要になる。
ここで座標系{i_c}の角速度および角加速度については座標系{i}も座標系{i_c}も同じ角速度および角加速度を有する。同じ剛体リンク上の点では、至る所、その角速度および角加速度が世界座標から観て一致しているからである。
他方、並進速度については関節(i-1)によって剛体リンク(i)が回転される分だけ一般に剛体リンク上の異なる点では値が異なることに注意されたい。
小型軽量化を目的として用いられるフレキシブルアームに対してはDH記法をそのまま適用することができない点には注意が必要である。なぜならDH記法では、リンク座標の原点をリンク先端部に設定するが、この方法をそのまま用いるとフレキシブルアームの先端が振動により時変となってしまうというきわめて厄介な問題が生じるからである。
この問題を解決するためにはフレキシブルアームにおいて、リンク座標の原点をリンク根元部に持ってきたうえで、リンク部の柔軟性を考慮するなど、DH記法を修正する必要がある(修正DH記法)。フレキシブルアームにおいては関節部を剛体、リンク部を柔軟体として、分離して考えるのである。
人間が直観的に見通しよくロボットを扱えるよう、表記法の工夫を凝らすことは、アフォーダンスの観点から極めて重要なのだ!医師が操作する医療ロボットにおいてもこれは同様であり、患者の安全・安心にとってもまた同様である。
印刷術も、アルファベットというデジタル化に適した表記法とうまくマッチングしたからこそ、今日のインターネットまでつながる、複製および知識の共有技術に関する一連のイノベーションにつながったのである!
ロボットの運動学においても実用的な線形代数はバネの伸縮と力の関係よろしく、入力n次元、出力m次元でのY=AXの演算が基本となっている。正規行列(normal matrix)であれば適当な正規直交基底を座標系に設定することで首尾よく対角化することができ、各軸方向ごとのバネの伸縮と力の関係よろしく、直観的に見通しのよい線形(1次近似的な)演算の問題へと落とし込むことができる。
正規行列の花形選手は直交(ユニタリ)行列と対称(エルミート)行列である。直交行列は、軸の取り換えと回転変換、対称行列は適当な正規直交基底のもとで各軸方向ごとに伸縮変換(したがって伸縮の度合いは各軸に対して対称である)をあらわす行列である。ユニタリ行列とエルミート行列はそれぞれ直交行列と対称行列を実空間から複素空間へとメタ的に拡張したものである。
ヤコビアンとテコの原理
ヤコビアンは手先速度(力)と関節速度(トルク)の比例定数で、テコの原理で、速度の拡大率と力の拡大率は逆数(反比例)の関係にある。ねじのドライバをイメージすると理解しやすい。取っ手の速度が(半径の比に比例して)縮小されるが、ドライバ先端で出力される回転力(トルク)は(半径の比に反比例して)拡大される。
各リンク座標系においては一般にデナビット・ハーテンバーグ(DH)法を用いて一般化座標たる関節角の方向を各リンク座標系のz軸にとり、このz軸回りの回転行列を用いて各リンク座標系の関節角と手先の位置・姿勢を結ぶ(一般には非1次線形の)関係式が定まる。
この関係式を各関節角で偏微分すれば、関節角速度と手先の速度・回転速度を1次線形に結ぶ(リンクする)ヤコビアン(行列)があらわれる。また、関節トルク(回転力)と手先の力・モーメントはテコの原理でヤコビアンの随伴(転置)行列によって結ばれる(リンクされる)。

(参考文献)
齋藤正彦,行列の解析学,東京図書,2017.
拘束条件(constrAint condItion)を幾何学的に表現したときに、拘束力は幾何学条件に対して局所的にみて直交する。他方、仮想変位のベクトルは上記幾何学条件に対して局所的にみれば接平面内にある。上記より、拘束力と仮想変位のスカラー積は常にゼロとなる。すなわち、拘束力は仕事をしない。
(参考文献)
[1] https://ja.wikipedia.org/wiki/%E5%A4%9A%E6%A7%98%E4%BD%93
[2] https://ja.wikipedia.org/wiki/%E5%8F%AF%E5%BE%AE%E5%88%86%E5%A4%9A%E6%A7%98%E4%BD%93
[3] https://www.youtube.com/watch?v=XPUuF_dECVI
[4] コリオリ力と遠心力:https://www.youtube.com/watch?v=uIicLKeDrfY
[5] 最小作用の原理はどこからくるか?:
http://www.phys.u-ryukyu.ac.jp/~maeno/cgi-bin/pukiwiki/index.php?%BA%C7%BE%AE%BA%EE%CD%D1%A4%CE%B8%B6%CD%FD%A4%CF%A4%C9%A4%B3%A4%AB%A4%E9%A4%AF%A4%EB%A4%AB%A1%A9
[6] 最小作用の原理:
https://ja.wikipedia.org/wiki/%E6%9C%80%E5%B0%8F%E4%BD%9C%E7%94%A8%E3%81%AE%E5%8E%9F%E7%90%86
[5] 最小作用の原理はどこからくるか?:
http://www.phys.u-ryukyu.ac.jp/~maeno/cgi-bin/pukiwiki/index.php?%BA%C7%BE%AE%BA%EE%CD%D1%A4%CE%B8%B6%CD%FD%A4%CF%A4%C9%A4%B3%A4%AB%A4%E9%A4%AF%A4%EB%A4%AB%A1%A9
[6] 最小作用の原理:
https://ja.wikipedia.org/wiki/%E6%9C%80%E5%B0%8F%E4%BD%9C%E7%94%A8%E3%81%AE%E5%8E%9F%E7%90%86
遠隔超音波診断システムの機構的な機能実装の特徴について概説する。1点めとして,直観的にわかりやすく(アフォーダンスが高く)誤差が蓄積しない自由度構成となっている。これにより,医師にとっては扱いやすく,患者にとっては安全・安心なシステムが実現する。また,スレーブの位置・姿勢は互いに独立な機構となっており,アーム型のマニピュレータと異なり,根元の誤差が先端で蓄積しない。
RCM (Remote Center of Motion)機構により,プローブの位置は姿勢にかかわらず一定となっている。これにより,万が一,姿勢を制御するソフトウェアが暴走しても患者に危害を与えにくくなっている。
2点めとして,位置・姿勢を高速・高精度に実現できる剛性の高い機構を採用している。これは,力を受けても変形しない直動および曲率ガイドにより実現している。
3点めとして,患部との接触状態を維持し,医師に提示するための力センサをマスタおよびスレーブの双方に組み込んでいる。さらに,スレーブ先端部にプローブ押しつけ方向に動作する冗長な可動軸を配置している。これにより患部との接触状態の維持を大幅に容易化することができる。
このように冗長機構をうまく組み合わせることで,タスクや目的に応じて最適な制御系を同時に複数実装し,同時に働かせることができ,システム全体としてのパフォーマンスを大きく向上することが可能になる。
超音波診断においては一般にプローブ操作タスクは複数存在し,診断の進行に応じてつぎつぎに切替わる,あるいは複数のタスクを同時に実行する必要が生じるため,タスクによっては制御機構とのミスマッチが生じる。
このような問題に対して,冗長化によってシステムに複数の制御機構をもたせて同時に働かせることはきわめて有望な機構的機能実装アプローチと言える。
一般に超音波診断では、診断画像の維持・適正化においてプローブの押し込み軸方向にコンプライアンス(押されたら柔軟に引き下がる能力、引かれたらすかさず押し込む能力)を高めて体表との接触安定性を高度に保ちながら、なおかつそのほかの軸については剛性をなるべく高めて位置・姿勢を精確に実現・維持することが機構システムに求められる。
われわれの提案する、剛性の高いガイド機構をベースとして機構システムを構築し、手先押し込み軸方向にはコンプライアンス(ばね)機構を配置するハイブリッド(混成)型の機構システムは上記のニーズをうまく満たすことができるものとなっている。
このように冗長機構をうまく組み合わせることで,タスクや目的に応じて最適な制御系を同時に複数実装し,同時に働かせることができ,システム全体としてのパフォーマンスを大きく向上することが可能になる。
超音波診断においては一般にプローブ操作タスクは複数存在し,診断の進行に応じてつぎつぎに切替わる,あるいは複数のタスクを同時に実行する必要が生じるため,タスクによっては制御機構とのミスマッチが生じる。
このような問題に対して,冗長化によってシステムに複数の制御機構をもたせて同時に働かせることはきわめて有望な機構的機能実装アプローチと言える。
 |
| 遠隔超音波診断システムの機構に関する機能実装 |
異構造マスタ・スレーブ・システム
マスタ・スレーブ・システムにおいて、スレーブは精度向上のためにタスクに特化させるにしても、経済的な観点からマスタの汎用・共通化は必要であろう。思考経済の観点からマスタは個々人の特性にあわせて扱いやすいものとすることも考慮するべきであろう。このため、マスタとスレーブの構造は一般的に異なるものが多くなる。
異構造マスタ・スレーブ・システムを採用するにあたっては、マスタ-スレーブ間に共通座標系を設定するなどの工夫が必要になる。
(生物の場合,ハードウェア機構はDNAにプログラムされた生来の機能)~~~~~~~
生物の場合,ハードウェア機構はDNAに、デジタルにプログラムされた生来の機能といえるだろう。一方で,それをソフトウェアと組み合わせてうまく最適化しながら使いこなすのは学習によって生後獲得する機能といえるだろう。ヒトの腕のようなアーム型は直観的に扱いにくく,技能の習得には鍛錬を要する。
~~~~~~~(生物の場合,ハードウェア機構はDNAにプログラムされた生来の機能)
~~~~~~~(生物の場合,ハードウェア機構はDNAにプログラムされた生来の機能)
NIUTS(Non-Invasive Ultrasound Theragnostic System)のシステム構成
\subsection{Implemented System Configuration}
The bed-type NIUTS (Figs. \ref{fig_sysConf}, \ref{fig_sysOverview}) was constructed based on the structured functional requirements, as described in Section \ref{Functional Requirements}. Stereo diagnostic images are acquired using two diagnostic probes. Here, HIFU Transducer hasn't been implemented yet in Fig. \ref{fig_sysOverview}, because this is the prototype system and we have to avoid the possibility to injure the human body by HIFU transducer by accident.
These images are then used to determine the 3D positioning data of the affected area and the focus position of the HIFU. Here, the specification of the visual servoing method is described in Section \ref{Basic Visual Servoing Method}. In the control, the focus point tracks and follows the target kidney stone using the 3D positioning data \cite{IROS2009:NKoizumi}. The HIFU irradiates the kidney stone using a function generator, an amplifier, and a transducer. The HIFU irradiation parameters are given in Reference \cite{JGP1942:TIkeda}.
The robot has a spherical piezoelectric transducer and two ultrasound probes (Fig. \ref{fig_sysConf}(c)), one of which is located in the center of the piezoelectric transducer and the other of which is located on the lateral side of the piezoelectric transducer. These two probes satisfy the following two requirements:
\begin{itemize}
\item[]\hspace{-0mm}(i)\hspace{3mm}The image planes of the probes are mutually perpendicular (Fig. \ref{fig_sysConf}(c)).\item[]\hspace{-0mm}(ii)\hspace{3mm}The focus of the HIFU, which is irradiated by piezoelectric transducers, is located on the image planes of both probes (Fig. \ref{fig_sysConf}(c)).
\end{itemize}
The two ultrasound image planes are shown in Fig. \ref{fig_sysConf}(c). The ultrasound image on the left is acquired by the probe in the center of the piezoelectric transducer, and the ultrasound image on the right is acquired by the probe on the lateral side of the piezoelectric transducer. In those ultrasound images, the phantom kidney organ incorporates the model kidney stone \cite{2005URJAMcAteer}, which appears as the bright regions.


ベッド型機構
本研究では,呼吸・心拍等により能動的に運動する患部を抽出・追従・モニタリングしながら,超音波を集束させてピンポイントに患部へ照射することにより,がん組織や結石の治療を患者の皮膚表面を切開することなく非侵襲かつ低負担で行なう非侵襲超音波診断・治療統合システム(NIUTS)を開発している.このうち,本節では,ベッド型の機構により,患部を超音波画像内に拘束することで,患部の抽出・追従・モニタリングを容易化する手法を概説する.
We have developed a non-invasive ultrasound theragnostic system (NIUTS) that tracks and follows the movement of an affected area (kidney stone / tumor, in this study) while irradiating it with high-intensity focused ultrasound (HIFU). In this section, we illustrate a method to simplify extracting, tracking, and following the affected area by using a bed-type NIUTS.
We have developed a non-invasive ultrasound theragnostic system (NIUTS) that tracks and follows the movement of an affected area (kidney stone / tumor, in this study) while irradiating it with high-intensity focused ultrasound (HIFU). In this section, we illustrate a method to simplify extracting, tracking, and following the affected area by using a bed-type NIUTS.
スクリュー、ツイスト、ならびにシャールの定理
線形時不変な自律システムにおける剛体の6自由度の位置と姿勢の変化は一定速度の世界座標からみた剛体座標系の並進運動と、その速度ベクトルに平行な世界座標の原点を通る軸まわりの角速度ベクトル(ω)であらわされる一定の剛体座標系の回転運動とが組み合わさったものとして表現できる。この運動をスクリューとよぶ。剛体の運動はスクリューであらわされる。また、この変化をあらわす状態遷移行列は一定の速度ベクトル(v)と角速度ベクトル(ω)を成分にもつ定ベクトルとしてのツイスト(ν)を用いて表現できる。これをシャールの定理という。
(参考文献)
[1] 内山 勝, 中村仁彦, ロボットモーション, 岩波書店, 2004.
線形時不変な自律システムにおける剛体の6自由度の位置と姿勢の変化は一定速度の世界座標からみた剛体座標系の並進運動と、その速度ベクトルに平行な世界座標の原点を通る軸まわりの角速度ベクトル(ω)であらわされる一定の剛体座標系の回転運動とが組み合わさったものとして表現できる。この運動をスクリューとよぶ。剛体の運動はスクリューであらわされる。また、この変化をあらわす状態遷移行列は一定の速度ベクトル(v)と角速度ベクトル(ω)を成分にもつ定ベクトルとしてのツイスト(ν)を用いて表現できる。これをシャールの定理という。
(参考文献)
[1] 内山 勝, 中村仁彦, ロボットモーション, 岩波書店, 2004.
自由度
(自由度)=(座標を記述する変数の数)-(拘束条件)
(参考文献)
[1] 内山 勝, 中村仁彦, ロボットモーション, 岩波書店, 2004.
非ホロノミックな拘束条件
拘束条件の表現の問題。
拘束条件が座標と時間のみで表現されるものをホロノミックな拘束条件、それ以外のものをの拘束条件を非ホロノミックな拘束条件という。非ホロノミックな拘束条件のなかには、ホロノミックな拘束条件に帰着できるものも存在する。
h(x,t)=0→ホロノミックな拘束条件
h(x,x^{・},t)=0→非ホロノミックな拘束条件
非ホロノミックな拘束条件
(参考文献)
[1] 内山 勝, 中村仁彦, ロボットモーション, 岩波書店, 2004.
[2] http://www.iis.u-tokyo.ac.jp/~suzukitk/research-nh-j.html
プローブの位置・姿勢制御機構
(自由度)=(座標を記述する変数の数)-(拘束条件)
(参考文献)
[1] 内山 勝, 中村仁彦, ロボットモーション, 岩波書店, 2004.
拘束条件の表現の問題。
拘束条件が座標と時間のみで表現されるものをホロノミックな拘束条件、それ以外のものをの拘束条件を非ホロノミックな拘束条件という。非ホロノミックな拘束条件のなかには、ホロノミックな拘束条件に帰着できるものも存在する。
h(x,t)=0→ホロノミックな拘束条件
h(x,x^{・},t)=0→非ホロノミックな拘束条件
非ホロノミックな拘束条件
(参考文献)
[1] 内山 勝, 中村仁彦, ロボットモーション, 岩波書店, 2004.
[2] http://www.iis.u-tokyo.ac.jp/~suzukitk/research-nh-j.html
プローブの位置・姿勢制御機構
本研究では,
We have developed a bed-type non-invasive ultrasound theragnostic system (NIUTS) that tracks and follows the movement of an affected area (kidney stone / tumor, in this study) by irradiating it with high-intensity focused ultrasound (HIFU). In this section, we propose a mechanism to control the position and orientation of the ultrasound probes aiming at enhancing the servoing performance of the affected area. Proper positions and orientations are required to acquire the proper ultrasound diagnostic images.
for rotation 先端部軽量化のため根元部に配置
for tilt 追従時動作のため先端部に配置
機構そのものに制御の機能デジタル関数を埋込むことも可能である。具体的にたとえば,子供のころによく遊んだ起き上がり小法師(こぼし)などは単純ではあるが,安定化機能を有する最たるものであろう。研究においても起き上がり小法師のような忍耐強い,不屈の根性がもとめられる。
for rotation 先端部軽量化のため根元部に配置
for tilt 追従時動作のため先端部に配置
~~~~~~~(機構そのものに制御の機能デジタル関数を埋込む)
(機構そのものに制御の機能デジタル関数を埋込む)~~~~~~~
機構の冗長化による診断・治療タスクに応じた機構・制御系の実装
本研究では,
Redundant mechanism and controller implementation in accordance with the theragnostic task functions
The authors have developed a non-invasive ultrasound theragnostic system (NIUTS) that compensates for movement by tracking and following the area to be treated by stereo ultrasound imaging while irradiating high-intensity focused ultrasound (HIFU) onto the affected area. In the present paper, we propose a redundant motion control mechanism in accordance with diagnostic and therapeutic functions for the NIUTS.
Specifically, we propose a redundant motion control mechanism of the HIFU focus, for therapeutics, that is independent of the ultrasound probes for diagnostics. Using the proposed redundant mechanism, the designated position of the affected area can be treated without changing the viewpoint of the ultrasound probes. Thus, the noise factors can be reduced, and the servoing performance can be enhanced.
~~~~~~~(企業では,MKS単位系はなくて単位は円)
某企業の医療ロボット開発者と話す機会があったのだが,企業では,MKS単位系はなくて単位は円しかないのだとか,,,大学研究者はコストを度外視してでも必要ならば性能の向上を目指すことが多々あるが,企業はコストに応じたそれなりの性能を引き出そうとする。コスト意識が大学と企業の大きな違いといえよう。
(企業では,MKS単位系はなくて単位は円)~~~~~~~
~~~~~~~(ネジがたった1本ゆるんでいただけで、、、)
高速・高精度な動作には剛性が重要である。剛性が足りないアーム型のような機構は力をうけると変形,位相変化が生じてしまう。このため本システムのようなビジュアルサーボ系は発散してしまう.私の所属する研究室は代々続く加工の研究室であり,力を受ける機構,力を受けても変形しない機構の活用にこそ,その真髄がある。具体的に直動ガイドや曲率ガイドを採用することにより機構部の剛性を高めることができ,これにより,きわめて高速・高精度な患部の追従が可能となる。実際にネジがたった1本ゆるんでいただけでシステムが発散してしまい,精度がでなかったことがある.
(ネジがたった1本ゆるんでいただけで、、、)~~~~~~~
本研究では,
The authors have developed a non-invasive ultrasound theragnostic system (NIUTS) that compensates for movement by tracking and following the area to be treated by stereo ultrasound imaging while irradiating high-intensity focused ultrasound (HIFU) onto the affected area. In the present paper, we propose a redundant motion control mechanism in accordance with diagnostic and therapeutic functions for the NIUTS.
Specifically, we propose a redundant motion control mechanism of the HIFU focus, for therapeutics, that is independent of the ultrasound probes for diagnostics. Using the proposed redundant mechanism, the designated position of the affected area can be treated without changing the viewpoint of the ultrasound probes. Thus, the noise factors can be reduced, and the servoing performance can be enhanced.
~~~~~~~(企業では,MKS単位系はなくて単位は円)
(企業では,MKS単位系はなくて単位は円)~~~~~~~
~~~~~~~(ネジがたった1本ゆるんでいただけで、、、)
(ネジがたった1本ゆるんでいただけで、、、)~~~~~~~
減速機
一般的なロボットに求められるのは低速・高トルク、一方で電動モータは高速・低トルク。よって減速機が必要になる。
減速機には、下記が求められる。
1. 高いバックドライバビリティ(押されたら、逆らわずにおされる)
2. 低いバックラッシュ(歯車のかみあいのわるさ、あそび)
3. 高い剛性
一般的なロボットに求められるのは低速・高トルク、一方で電動モータは高速・低トルク。よって減速機が必要になる。
減速機には、下記が求められる。
1. 高いバックドライバビリティ(押されたら、逆らわずにおされる)
2. 低いバックラッシュ(歯車のかみあいのわるさ、あそび)
3. 高い剛性
バックドライバビリティ機能
人体に対して接触動作する医療ロボットにおいては安全・安心・安定的で思いやりがあるシステム動作が要求される。このためロボットにおいてバックドライバビリティ機能を実装する必要がある。バックドライバビリティとは,アクチュエータを外からの力により動かすことができる(押されたら、逆らわずに押される)性質である。高減速比のアクチュエータにはこの性質がほとんどない。アクチュエータのバックドライバビリティが不足する場合には,バネ機構を手先効果器に追加実装することでロボット全体としてのバックドライバビリティを高めることが可能である。
減速機の影響と位置制御+ばね機構のコンビネーション(技)
モータ軸から関節軸までの減速比を仮に100(k)とすると、モータの回転子(ロータ)の慣性モーメントは10000(k^2)倍になる。具体的に減速比は2つの歯車の歯数の比で表現される。歯車の歯の数は歯車の半径に比例して多くなり、これはシーソーの支点からの距離に対応している。シーソーの支点まわりの慣性モーメントは支点からの距離の2乗に比例することから(慣性モーメントはシーソーに乗る人の支点からの距離で考えると理解しやすい、、、)、減速比(シーソーにすわる人の支点からの距離)がk(倍)であれば(シーソーの支点まわりの)慣性モーメントはk^2倍になる。
すなわち、モータの回転子自身の慣性モーメントが減速機の効果によってロボットのリンクの慣性モーメントと同等か、それ以上にロボットの運動に効いているのが現状である。このため、減速機の大きな駆動機構は繊細な力制御をおこなおうとすると、上記の慣性モーメント増大の影響で力の伝達効果が低下するため、そのままではうまく機能しない。
上記のように減速機が大きくなると力(トルク)の直接的な伝達能力が低下するため、たとえば超音波プローブが人体と接触動作する際の微妙なパッシビティ機能(押されたら押される、引かれたらすかさず押すことで接触安定性を維持する機能)といった、繊細な力制御を具備した安全・安心・安定的でおもいやりのあるシステム動作を実現することが困難になる。
これに対して繊細な力制御においてトルク制御のみでがんばろうとするよりも(パルスモータによる精確な)位置制御 +(フィジカルな)ばね機構のコンビネーション(技)で、繊細な接触安定性の維持機能については、潔(いさぎよ)くばね機構にまかせてしまおうという一撃必殺のアプローチ法による返し技が存在する。この方法は実装が簡便で機能メカニズムも明解であるため、人体に接触動作する医療ロボットにおいても汎用されている。
(参考文献)
[1] 内山 勝, 中村仁彦, ロボットモーション, 岩波書店, 2004.[2] 有本 卓,ロボットの力学と制御,朝倉書店,1990.
ロボット機構部の振動ロボット・アーム(リンク)には駆動軸をはじめ、弾性要素が少なからず存在し、これがメカニズム全体の剛性を低下させ、振動を引き起こす原因となっている。この問題を解決するためには剛性の高いマニピュレータをつくる必要があるが、つねに軽量化との両立(トレード・オフ: trade off)が技術課題として存在している。これは医療ロボットにおいても同様である。内視鏡ロボット機構など、柔軟性を求めらる機構には軽量化と剛性のトレード・オフ、振動の問題はつきものである。
(参考文献)内山 勝,中村仁彦,ロボットモーション,岩波書店.
研究室の冷蔵庫がゴムバンドによるバネ・マス・ダンパ系制振対応になりました。ゴムのバネ・ダンパ要素のコラボで冷蔵庫の運動エネルギーを減衰します。地震が収まったあとは消しゴムで字を消した後のまさつエネルギーよろしくベルトのゴムの温度が冷蔵庫の運動エネルギーの分だけ上がっているはず、、、600リットルの冷蔵庫にも対応できる働き者だそうです。ベルト機構がおしゃれですね、、、

3Dプリンタ技術が加速する医デジ化
機構においても今や、デジタルに設計/保存したモノがデジタルに実現/再現される時代であり[1]、今後この傾向は加速するであろう[1-5]。東京藝術大学では、デジタル技術とアナログ技術を融合させることで、色味や質感、筆のタッチや凹凸、材料や組成分布までもオリジナルの絵画(1568年頃、フリューゲル作)に近づけた、クローン文化財としての『バベルの塔』を3Dで再現した[1]。患者の医用画像データをもとに構築した臓器の3Dプリントモデルを用いて医師が事前に手術計画を立て、これを患者に説明したり、ヒト組織の3次元構築により、機能もふくめて臓器を構築したりと、医療用途においても、3Dプリンタ技術の応用が期待されており、2025年度には10億ドルの市場が見込まれている [2-5]。
3Dプリンタ技術の適用範囲は近年急速に拡大しておりデザイン性の評価のみならず従来では精度および強度の面から困難であった部品の組付性や機能性(カラー、透明性、耐熱性、耐衝撃性、耐久性等)の評価においても近年の3Dプリント技術は至適になりつつある[6][7]。具体的に15μmピッチの高精細の3D部品の試作[6]、硬い樹脂造形だけではなく、柔らかい樹脂造形が可能なもの[7]などがあり、ロボット工学系、医用工学系、デザイン工学系の研究のみならず、今後あらゆる分野に適用が拡大するであろう。
(参考文献)
[1] バベルの塔展, http://babel2017.jp/
[2] http://astavision.com/market/2/16
[3] CELLINK社製 高機能3Dバイオプリンター, BIO X, http://www.filgen.jp/Product/SI/Cellink/index.html
[4] https://www.fuze.dj/2017/01/bio3d_harvard.html
[5] 江浦史生, 相澤理佳, 冨田恭平, 近藤亮祐, 小泉憲裕, 可搬型超音波体動補償装置の開発, 1A1-J04, ロボティクス・メカトロニクス講演会2017, ビッグパレットふくしま, 郡山, 2017.
[6] アビスト 3Dプリント, https://www.abist-3dprint.com/
[7] ミッツ株式会社 3Dプリンタ, http://www.mits.co.jp/3d/index.htm
超音波ファントムにみられる医デジ化
従来からの超音波ファントムの製品[1-5]に加えて、3Dプリンタを用いた臓器ファントムの作成も可能になりつつある[6]。
(参考文献)
[1] Takeshi Soyama, et al., Comparison of conventional ultrasonography and ultrasonography-computed tomography fusion imaging for target identification using digital/real hybrid phantoms: a preliminary study, J Med Ultrasonics, 2016.
[2] OST株式会社, https://www.ost-jp.com/
[3] タナック株式会社, http://www.k-tanac.co.jp/
[4] 株式会社京都科学, https://www.kyotokagaku.com/jp/
[5] イーステック株式会社, http://www.eastek.co.jp/
[6] ミッツ株式会社 3Dプリンタ, http://www.mits.co.jp/3d/index.htm
深ざぐり
ボルトなどの頭を隠す目的で、ざぐりを深く掘ることを、「深ざぐり」という。
深ざぐりの場合、穴深さ記号の後ろに深さを入れる。また、深座ぐりの場合は、ざぐり穴を示す円を図面に描く必要がある。
(参考文献)
[1] 内山 勝, 中村仁彦, ロボットモーション, 岩波書店, 2004.
[2] 有本 卓,ロボットの力学と制御,朝倉書店,1990.
ロボット機構部の振動
ロボット・アーム(リンク)には駆動軸をはじめ、弾性要素が少なからず存在し、これがメカニズム全体の剛性を低下させ、振動を引き起こす原因となっている。この問題を解決するためには剛性の高いマニピュレータをつくる必要があるが、つねに軽量化との両立(トレード・オフ: trade off)が技術課題として存在している。これは医療ロボットにおいても同様である。内視鏡ロボット機構など、柔軟性を求めらる機構には軽量化と剛性のトレード・オフ、振動の問題はつきものである。
(参考文献)
内山 勝,中村仁彦,ロボットモーション,岩波書店.
研究室の冷蔵庫がゴムバンドによるバネ・マス・ダンパ系制振対応になりました。ゴムのバネ・ダンパ要素のコラボで冷蔵庫の運動エネルギーを減衰します。地震が収まったあとは消しゴムで字を消した後のまさつエネルギーよろしくベルトのゴムの温度が冷蔵庫の運動エネルギーの分だけ上がっているはず、、、600リットルの冷蔵庫にも対応できる働き者だそうです。ベルト機構がおしゃれですね、、、

3Dプリンタ技術が加速する医デジ化
機構においても今や、デジタルに設計/保存したモノがデジタルに実現/再現される時代であり[1]、今後この傾向は加速するであろう[1-5]。東京藝術大学では、デジタル技術とアナログ技術を融合させることで、色味や質感、筆のタッチや凹凸、材料や組成分布までもオリジナルの絵画(1568年頃、フリューゲル作)に近づけた、クローン文化財としての『バベルの塔』を3Dで再現した[1]。患者の医用画像データをもとに構築した臓器の3Dプリントモデルを用いて医師が事前に手術計画を立て、これを患者に説明したり、ヒト組織の3次元構築により、機能もふくめて臓器を構築したりと、医療用途においても、3Dプリンタ技術の応用が期待されており、2025年度には10億ドルの市場が見込まれている [2-5]。
3Dプリンタ技術の適用範囲は近年急速に拡大しておりデザイン性の評価のみならず従来では精度および強度の面から困難であった部品の組付性や機能性(カラー、透明性、耐熱性、耐衝撃性、耐久性等)の評価においても近年の3Dプリント技術は至適になりつつある[6][7]。具体的に15μmピッチの高精細の3D部品の試作[6]、硬い樹脂造形だけではなく、柔らかい樹脂造形が可能なもの[7]などがあり、ロボット工学系、医用工学系、デザイン工学系の研究のみならず、今後あらゆる分野に適用が拡大するであろう。
3Dプリンタ技術の適用範囲は近年急速に拡大しておりデザイン性の評価のみならず従来では精度および強度の面から困難であった部品の組付性や機能性(カラー、透明性、耐熱性、耐衝撃性、耐久性等)の評価においても近年の3Dプリント技術は至適になりつつある[6][7]。具体的に15μmピッチの高精細の3D部品の試作[6]、硬い樹脂造形だけではなく、柔らかい樹脂造形が可能なもの[7]などがあり、ロボット工学系、医用工学系、デザイン工学系の研究のみならず、今後あらゆる分野に適用が拡大するであろう。
(参考文献)
[1] バベルの塔展, http://babel2017.jp/
[2] http://astavision.com/market/2/16
[3] CELLINK社製 高機能3Dバイオプリンター, BIO X, http://www.filgen.jp/Product/SI/Cellink/index.html
[4] https://www.fuze.dj/2017/01/bio3d_harvard.html
[5] 江浦史生, 相澤理佳, 冨田恭平, 近藤亮祐, 小泉憲裕, 可搬型超音波体動補償装置の開発, 1A1-J04, ロボティクス・メカトロニクス講演会2017, ビッグパレットふくしま, 郡山, 2017.
[6] アビスト 3Dプリント, https://www.abist-3dprint.com/
[7] ミッツ株式会社 3Dプリンタ, http://www.mits.co.jp/3d/index.htm
[2] http://astavision.com/market/2/16
[3] CELLINK社製 高機能3Dバイオプリンター, BIO X, http://www.filgen.jp/Product/SI/Cellink/index.html
[4] https://www.fuze.dj/2017/01/bio3d_harvard.html
[5] 江浦史生, 相澤理佳, 冨田恭平, 近藤亮祐, 小泉憲裕, 可搬型超音波体動補償装置の開発, 1A1-J04, ロボティクス・メカトロニクス講演会2017, ビッグパレットふくしま, 郡山, 2017.
[6] アビスト 3Dプリント, https://www.abist-3dprint.com/
[7] ミッツ株式会社 3Dプリンタ, http://www.mits.co.jp/3d/index.htm
従来からの超音波ファントムの製品[1-5]に加えて、3Dプリンタを用いた臓器ファントムの作成も可能になりつつある[6]。
(参考文献)
[1] Takeshi Soyama, et al., Comparison of conventional ultrasonography and ultrasonography-computed tomography fusion imaging for target identification using digital/real hybrid phantoms: a preliminary study, J Med Ultrasonics, 2016.
[2] OST株式会社, https://www.ost-jp.com/
[3] タナック株式会社, http://www.k-tanac.co.jp/
[4] 株式会社京都科学, https://www.kyotokagaku.com/jp/
[5] イーステック株式会社, http://www.eastek.co.jp/
[6] ミッツ株式会社 3Dプリンタ, http://www.mits.co.jp/3d/index.htm
[2] OST株式会社, https://www.ost-jp.com/
[3] タナック株式会社, http://www.k-tanac.co.jp/
[4] 株式会社京都科学, https://www.kyotokagaku.com/jp/
[5] イーステック株式会社, http://www.eastek.co.jp/
[6] ミッツ株式会社 3Dプリンタ, http://www.mits.co.jp/3d/index.htm
深ざぐり
ボルトなどの頭を隠す目的で、ざぐりを深く掘ることを、「深ざぐり」という。
深ざぐりの場合、穴深さ記号の後ろに深さを入れる。また、深座ぐりの場合は、ざぐり穴を示す円を図面に描く必要がある。
(参考文献)
[1] http://d-engineer.com/seizu/sunpoukinyuu.html
[1] http://d-engineer.com/seizu/sunpoukinyuu.html
テンソル
テンソルの特徴には以下の2つがある。
特徴1:正方行列である特徴2:正方行列の各成分が空間座標のx, y, zと密接に関連している。
テンソルとベクトルの違いのひとつは、座標系の回転における回転軸以外の成分の符号の変化にある。具体的にたとえば、z軸のまわりに座標系をπ回転することによってベクトルのx,y成分の符号は反転するが、テンソルの符号は同符号となる。このことはベクトルが片側矢印(⇒)であるのに対して、テンソルは両側矢印(⇔)に対応するためである。
超音波診断ロボットにおいても同様である。ためしにロボットに超音波プローブを持たせて、プローブの軸回りにぐるっと180度回転してみよう。観察対象の臓器の速度(や力)といったベクトルの成分(観察系である超音波画像座標系のx,y成分、ここで、プローブスキャン面はxzあるいはyz平面であることに注意されたい!)は反転(z成分はそのまま)するが、周辺組織とのおしくらまんじゅう効果による臓器組織の圧縮・伸長など、緊張(応力)状態をあらわすテンソル成分の符号は不変である。
ちなみに臓器の温度や速度ベクトルの大きさなど、スカラー量の場合にはどのような回転が加わったとしてもその符号は変化しない。社会システムや人生システムも日々回転している。昨日まで順風だったのに、今日は逆風ということも十分に起こりうる。その逆もまたしかり。忍耐力が重要なゆえんであろう。
(参考文献)高木隆司, キーポイント ベクトル解析, 岩波書店, 1993.
応力テンソル
弾性体を変形させたとき、その内部の緊張(tension)状態をテンソル(tensor)によって表現することができる。直観的にはスポンジの穴を変形させたときの物体内部の緊張(応力)状態をイメージすればよい。医用画像の場合も同様の方法で体内における臓器どうしのおしくらまんじゅうによる臓器組織の緊張(応力)状態を推定することが一定程度可能であろう。
慣性(モーメント)テンソル
慣性(モーメント)テンソルは、座標系の(座標)軸(一般的には、正規直交するx軸、y軸,z軸)まわりの、回転のしにくさ(値が大きい方が回転しにくい)をあらわすモーメントであり、正値対称行列で表現できる。対称行列は、直交行列により、座標系をクルクル回転させればうまく対角化できる。この対角化された行列の固有ベクトル軸たるx軸、y軸,z軸は慣性の主軸とよばれ、このとき固有ベクトルに対応する固有値は対角成分にずらりと並ぶ。
正定値対称行列の固有値の値はすべて正の値になる。最小固有値を与える軸まわりが最も回転しやすい軸で、最小慣性主軸と呼ばれる。人間の場合は体軸とほぼ一致する。最大固有値を与える軸回りが最も回転しにくい軸で、最大慣性の主軸とよばれる。人間の場合は側転方向で、つぎが前転方向である。起き上がり小法師よろしく寝ている状態から前転方向に起き上がるのは比較的容易だが、側転方向に起き上がることはなかなかに大変である。
テンソルの特徴には以下の2つがある。
応力テンソル
弾性体を変形させたとき、その内部の緊張(tension)状態をテンソル(tensor)によって表現することができる。直観的にはスポンジの穴を変形させたときの物体内部の緊張(応力)状態をイメージすればよい。医用画像の場合も同様の方法で体内における臓器どうしのおしくらまんじゅうによる臓器組織の緊張(応力)状態を推定することが一定程度可能であろう。
微小回転と瞬間回転(角速度)
2次の微小項は無視できることに注意する。
ガウスの発散定理
divergence、内積を用いる。出血や輸血などによる血流の増減を表現できる。
divergence、内積を用いる。出血や輸血などによる血流の増減を表現できる。
ストークスの定理
rotation、外積を用いる。動脈瘤や腸管などにおける食塊の流れなど、回転をともなって流動する流れなどを表現できる。
rotation、外積を用いる。動脈瘤や腸管などにおける食塊の流れなど、回転をともなって流動する流れなどを表現できる。
ストークスの定理とポテンシャル関数
プローブの位置・姿勢・押しつけ力によって超音波画像の最適化が可能である。このことは、最適な位置・姿勢・押しつけ力を山の頂上とする、診断画像適正化のポテンシャル場を多様体でモデル化される体表面上に設定できる可能性を示唆している。
プローブの位置・姿勢・押しつけ力によって超音波画像の最適化が可能である。このことは、最適な位置・姿勢・押しつけ力を山の頂上とする、診断画像適正化のポテンシャル場を多様体でモデル化される体表面上に設定できる可能性を示唆している。
Rotationと角速度
ベクトル場のrotationは渦流密度を表す。速度場の場合は角速度、力場の場合は力のモーメントをもたらす。ストークスの定理はrotationによってもたらされる渦流密度を面積分することができて、総渦流が計算できることを主張している。

プローブの軸回りの回転と超音波画像上の点の運動プローブの軸(z軸)回りの回転(プローブの押し込み方向を正とする)によって、超音波画像上で中心軸(z軸)を境に右半分の点は奥側に、左半分の点は手前側に、その瞬間瞬間に運動している。このとき、超音波画像上の点の速度はz軸からの距離rとプローブの回転速度ωを用いてrωで表現される。また、xyz空間を適当なzの値で切断したxy断面を考えれば、xy平面はz軸まわりに回転するベクトル場を形成している。
このとき臓器の重心が常にz軸上にくるように超音波プローブの位置を臓器に追従したうえで、超音波画像上のすべての点の速度がゼロになる(超音波画像が維持・保存される)ようにプローブの回転速度を制御できれば、臓器の回転運動にプローブの回転運動が追従していることになる。ここでは簡単のため、臓器が剛体で、臓器の回転運動がz軸まわりの運動のみであることを仮定している。
Frenet-Serret Formula
立体曲線の曲率やねじれを表現できる。体内の血管にはねじれがあり、ひとつの平面内にとどまらない。

ストークスの定理とポテンシャル関数
力をはじめとするベクトル場(A)はその上位にポテンシャル関数(U)が存在する。具体的にたとえば力のベクトル場は
A= - grad U
と表現される。力の場がなぜ上式のように表現できるのかを理解するためにはまず、ストークスの定理について理解することが重要である。
一般に、
A = - rot(grad U) = 0
が成立することが知られている。等高線と最大傾斜方向(grad U)とは常に直交しており、なおかつgrad Uを通る道筋は片側通行(ポテンシャルは常に高きところから低きところへと流れる)であるため、ループを描いてふたたび同じ(ポテンシャルの)点へと戻ってくるようなループ(渦流)が生じる余地がどこにもないためである(rot = 0)。
ストークスの定理はベクトル場の渦流の強さをあらわすためのものだったが、同時にポテンシャル関数の存在のように、rotをかけると0になるようなベクトル場の性質を理解するうえでもその存在は極めて有用である。
超音波診断画像の獲得操作においては体表に対するプローブの位置・姿勢・押しつけ力を首尾よく再現できれば、(観察対象である臓器内の患部へと)アプローチする経路によらず、ほぼ同様の診断画像獲得の再現が期待できる(ここでは簡単化のため、患者の体位の変更や呼吸動や拍動といった体動については無視することとする)。このことは、超音波診断画像獲得のためのプローブ操作の再現やその最適化においてポテンシャル関数やこれを改良した評価関数の導入によるAI・ロボティック超音波がきわめて有効であることを示唆している。
超音波画像には精度(分解能や音響ビームフォーカス)の観点から画面中央付近にストライクゾーンがあり、患部が埋め込まれた臓器をこのストライクゾーン内(画面中央)に(ピン止めして)捉えることはきわめて重要である。観察対象がストライクゾーンに入っているかどうかも画像の適正度を評価するうえで考慮すべき重要な点のひとつである。
ラプラシアンと平均曲率
ラプラシアンという微分演算はいろいろさまざまな分野であらわれる。ラプラシアンは(超)曲面の平均曲率をあらわすと考えればが直観・幾何学・野性的に見通し良く単純・明解にハンドリングできる。具体的に2(n)変数関数のラプラシアンはその関数をz=f(x,y,…)という(超)曲面と考えたときの平均曲率をあらわす。超曲面(n次元空間内のn-1次元超曲面)への一般化は容易である。
ベクトル場のrotationは渦流密度を表す。速度場の場合は角速度、力場の場合は力のモーメントをもたらす。ストークスの定理はrotationによってもたらされる渦流密度を面積分することができて、総渦流が計算できることを主張している。

プローブの軸回りの回転と超音波画像上の点の運動
プローブの軸(z軸)回りの回転(プローブの押し込み方向を正とする)によって、超音波画像上で中心軸(z軸)を境に右半分の点は奥側に、左半分の点は手前側に、その瞬間瞬間に運動している。このとき、超音波画像上の点の速度はz軸からの距離rとプローブの回転速度ωを用いてrωで表現される。また、xyz空間を適当なzの値で切断したxy断面を考えれば、xy平面はz軸まわりに回転するベクトル場を形成している。
このとき臓器の重心が常にz軸上にくるように超音波プローブの位置を臓器に追従したうえで、超音波画像上のすべての点の速度がゼロになる(超音波画像が維持・保存される)ようにプローブの回転速度を制御できれば、臓器の回転運動にプローブの回転運動が追従していることになる。ここでは簡単のため、臓器が剛体で、臓器の回転運動がz軸まわりの運動のみであることを仮定している。
Frenet-Serret Formula
立体曲線の曲率やねじれを表現できる。体内の血管にはねじれがあり、ひとつの平面内にとどまらない。
立体曲線の曲率やねじれを表現できる。体内の血管にはねじれがあり、ひとつの平面内にとどまらない。

ストークスの定理とポテンシャル関数
力をはじめとするベクトル場(A)はその上位にポテンシャル関数(U)が存在する。
力をはじめとするベクトル場(A)はその上位にポテンシャル関数(U)が存在する。
具体的にたとえば力のベクトル場は
A= - grad U
と表現される。力の場がなぜ上式のように表現できるのかを理解するためにはまず、ストークスの定理について理解することが重要である。
一般に、
A = - rot(grad U) = 0
が成立することが知られている。等高線と最大傾斜方向(grad U)とは常に直交しており、なおかつgrad Uを通る道筋は片側通行(ポテンシャルは常に高きところから低きところへと流れる)であるため、ループを描いてふたたび同じ(ポテンシャルの)点へと戻ってくるようなループ(渦流)が生じる余地がどこにもないためである(rot = 0)。
ストークスの定理はベクトル場の渦流の強さをあらわすためのものだったが、同時にポテンシャル関数の存在のように、rotをかけると0になるようなベクトル場の性質を理解するうえでもその存在は極めて有用である。
超音波診断画像の獲得操作においては体表に対するプローブの位置・姿勢・押しつけ力を首尾よく再現できれば、(観察対象である臓器内の患部へと)アプローチする経路によらず、ほぼ同様の診断画像獲得の再現が期待できる(ここでは簡単化のため、患者の体位の変更や呼吸動や拍動といった体動については無視することとする)。このことは、超音波診断画像獲得のためのプローブ操作の再現やその最適化においてポテンシャル関数やこれを改良した評価関数の導入によるAI・ロボティック超音波がきわめて有効であることを示唆している。
超音波画像には精度(分解能や音響ビームフォーカス)の観点から画面中央付近にストライクゾーンがあり、患部が埋め込まれた臓器をこのストライクゾーン内(画面中央)に(ピン止めして)捉えることはきわめて重要である。観察対象がストライクゾーンに入っているかどうかも画像の適正度を評価するうえで考慮すべき重要な点のひとつである。
ラプラシアンと平均曲率
ラプラシアンという微分演算はいろいろさまざまな分野であらわれる。ラプラシアンは(超)曲面の平均曲率をあらわすと考えればが直観・幾何学・野性的に見通し良く単純・明解にハンドリングできる。具体的に2(n)変数関数のラプラシアンはその関数をz=f(x,y,…)という(超)曲面と考えたときの平均曲率をあらわす。超曲面(n次元空間内のn-1次元超曲面)への一般化は容易である。
ラプラシアンという微分演算はいろいろさまざまな分野であらわれる。ラプラシアンは(超)曲面の平均曲率をあらわすと考えればが直観・幾何学・野性的に見通し良く単純・明解にハンドリングできる。具体的に2(n)変数関数のラプラシアンはその関数をz=f(x,y,…)という(超)曲面と考えたときの平均曲率をあらわす。超曲面(n次元空間内のn-1次元超曲面)への一般化は容易である。